
|
Collaboration diagram for Client Handler Subsystem:
|
|
Functions | |
| bs_status | init_threadsystem (apr_pool_t *mp) |
| void | lets_go_threaded (void) |
| bs_status | stop_daemon (bs_uint32 num_usecs) |
| bs_status init_threadsystem | ( | apr_pool_t * | mp | ) |
Initialize the thread handling system.
| mp | Memory pool to use |
Definition at line 313 of file thread.c.
References init_listen_socket(), listener_socket, new_list(), and sockets.
Referenced by main().
Here is the call graph for this function:
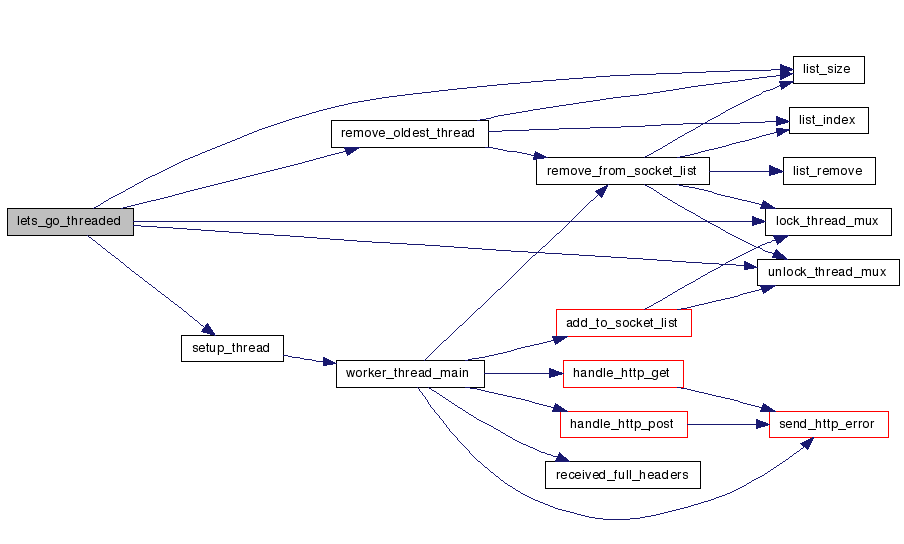
| void lets_go_threaded | ( | void | ) |
Start the main execution. The listening socket is initiated and the main thread starts listening for incoming connections. If there is a request, it will be serviced by a newly spawned worker thread.
There is some enforcement of a timeout on the worker threads. If they take too long, their socket will be closed resulting in a probable error and thus end of the thread.
Definition at line 358 of file thread.c.
References BIOSPHERED_MAX_CONNECTIONS, BS_OK, global_mp, list_size(), listener_socket, lock_thread_mux(), remove_oldest_thread(), runtestsuite::rv, setup_thread(), sockets, and unlock_thread_mux().
Referenced by main().
Here is the call graph for this function:
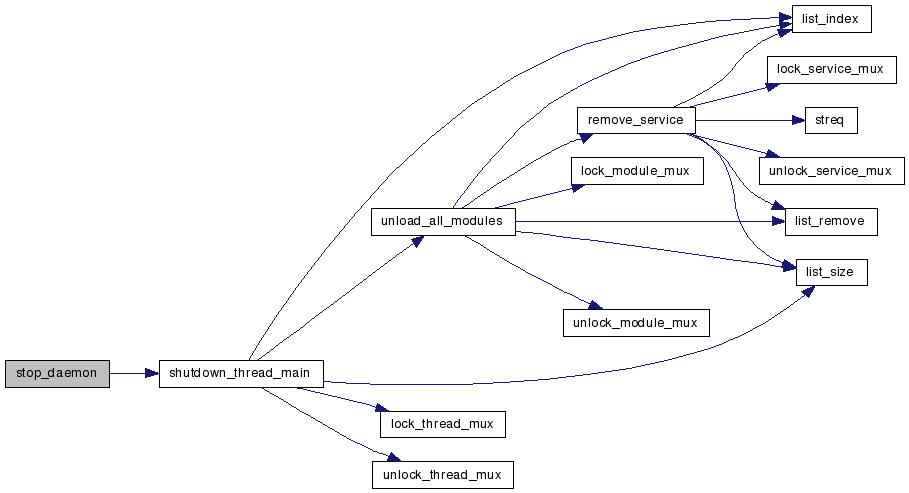
Makes the daemon stop quite drastically. All the active sockets, including the listening socket are closed and the exit() function is called.
| num_usecs | The number of microseconds to wait before initiating the shutdown |
Definition at line 449 of file thread.c.
References BS_ERROR, BS_OK, shutdown_info::pool, runtestsuite::rv, shutdown_thread_main(), and shutdown_info::wait_time.
Referenced by core_service_admin_shutdown().
Here is the call graph for this function:
 1.5.1
1.5.1